光学
通过头部相机或者THETA 3D相机实现缺陷的光学检测. 可以检测并分析所有可视缺陷. 使用头部相机时, 最快速度可达1500个工件/分钟.
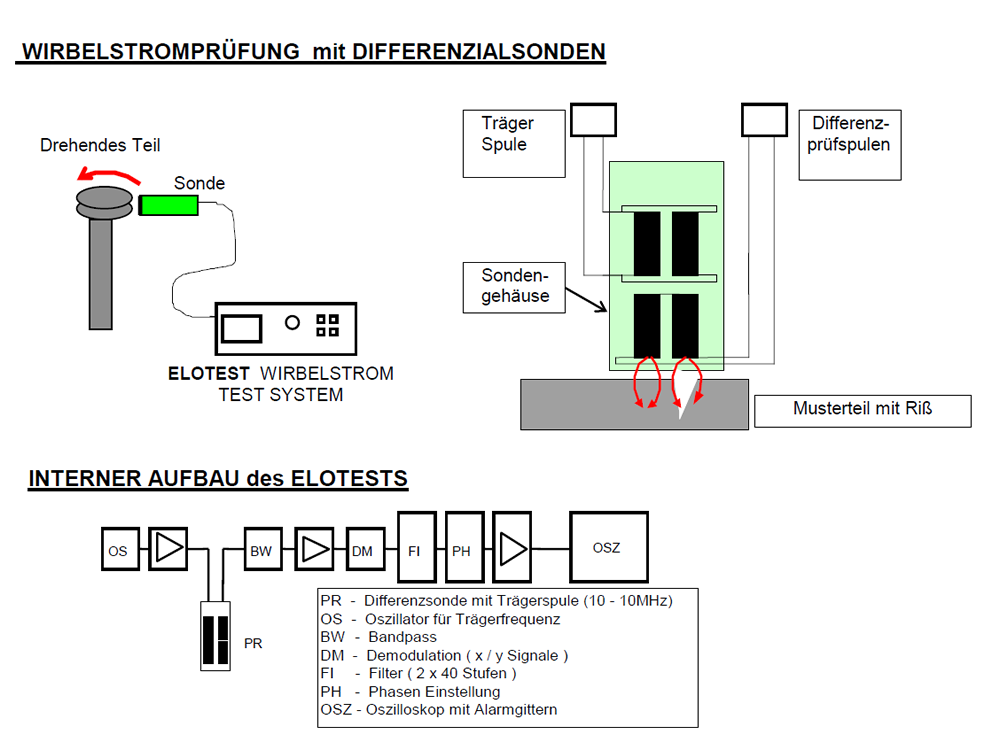
涡流
配备涡流探头的动态微分系统. 借助该手段可以发现材料内部可视和不可视的裂纹. 对工件进行旋转, 通过探头检测其一周. 旋转的控制精度为0.3°.
检测探头的位置
- 头部一周
- 头部下方
- 杆部
- 螺纹
- 头部上方
- 在球形头部一周的多个位置
多边形检测 / 非圆形的头部
为实现头部不圆, 多边形头部或者任何多边形弯曲部分的检测, 可通过电子距离补偿来调节探头, 也可以使用EDC系统移动探头, 距离差可达15mm.